Презентація на тему:
Вимірювальні прилади порівняння
Завантажити презентацію






 опір нуль-індикатора")





























 повна відсутність спожива...")
 компенсатори постійного ст...")











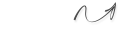
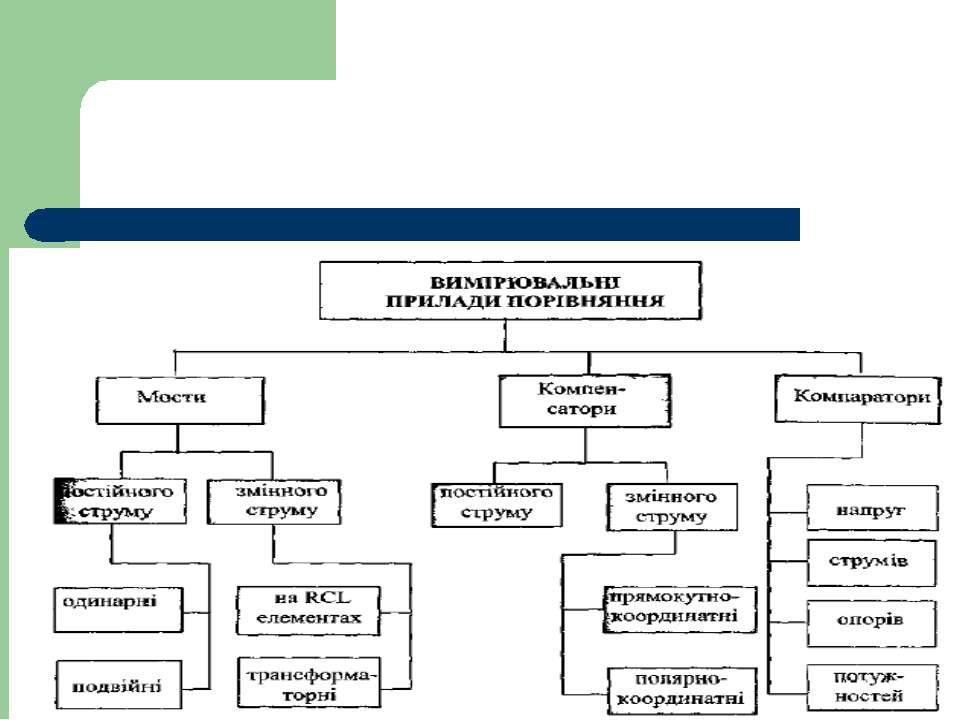
Вимірювальні прилади порівняння
Завантажити презентаціюПрезентація по слайдам:

Л13 Вимірювальні прилади порівняння

Зміст Прилади порівняння Мости 2 Компенсаційний метод вимірювання 38

Принципова схема одинарного мосту постійного струму

Характеристики моста Точки a, b, c, d носять назви вершин мосту Резистори R1,R2,R3,R4 - плечі мосту діагональ - (а - b ), в яку вмикається джерело живлення ДЖ, називається діагоналлю живлення, діагональ - (с — d), в яку вмикається нуль-індикатор НІ, - індикаторною діагоналлю.

Мости бувають Залежно від наявності чи відсутності напруги в індикаторній діагоналі у момент відліку вимірюваної величини мости поділяють на зрівноважені і Незрівноважені Залежно від роду струму постійного струму Змінного струму

Незрівноважені мости знайшли переважне застосування при вимірюваннях неелектричюп величин, попередньо перетворених на електричний опір, а також в процентних мостах, що вимірюють відхилення опору від номінального значення. Зрівноважені мости є засобами точних вимірювань електричних опорів.
 опір нуль-індикатора")
Струм індикаторної діагоналі де RHI - внутрішній (вхідний) опір нуль-індикатора

Умова рівноваги Для досягнення ІНІ = 0 необхідно виконати умову Звідсі маємо

Плечі R1 і R4, суміжні в мостовій схемі, називають плечами порівняння (найчастіше цю назву застосовують тільки до плеча R4). Два інші суміжні між собою плечі моста, опори яких входять до рівняння у вигляді відношення R2/R3 називають плечами відношення.

Оскільки умова рівноваги моста визначається лише співвідношенням опорів плеч моста і не залежить від напруги джерела живлення, то до джерел живлення не висувається жодних спеціальних вимог. Завдяки цій особливості мостові вимірювальні кола знайшли широке практичне застосування.

Принципова схема реального одинарного мосту R пор – резистор плеча порівняння

Для реального мосту

Процентний міст ΔI - оцифровано у відсотках

Чутливість мостової схеми За струмом За напругою

Якщо допустиме значення похибки вимірювання не задане, то його знаходять з умови де - граничне значення допустимої основної відносної похибки досліджуваного об'єкта

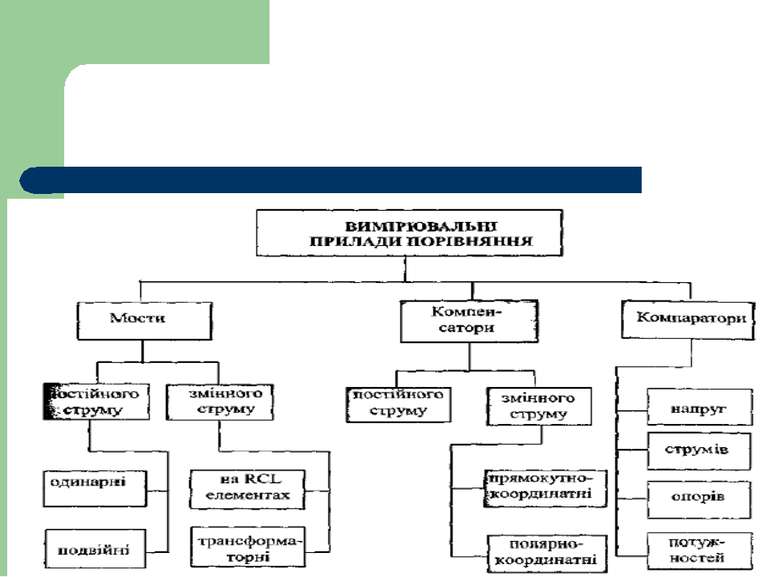
Похибка прямого вимірювання опору одинарним мостом за нормальних умов де основна похибка моста похибка квантування похибка від впливу опорів з'єднувальних проводів
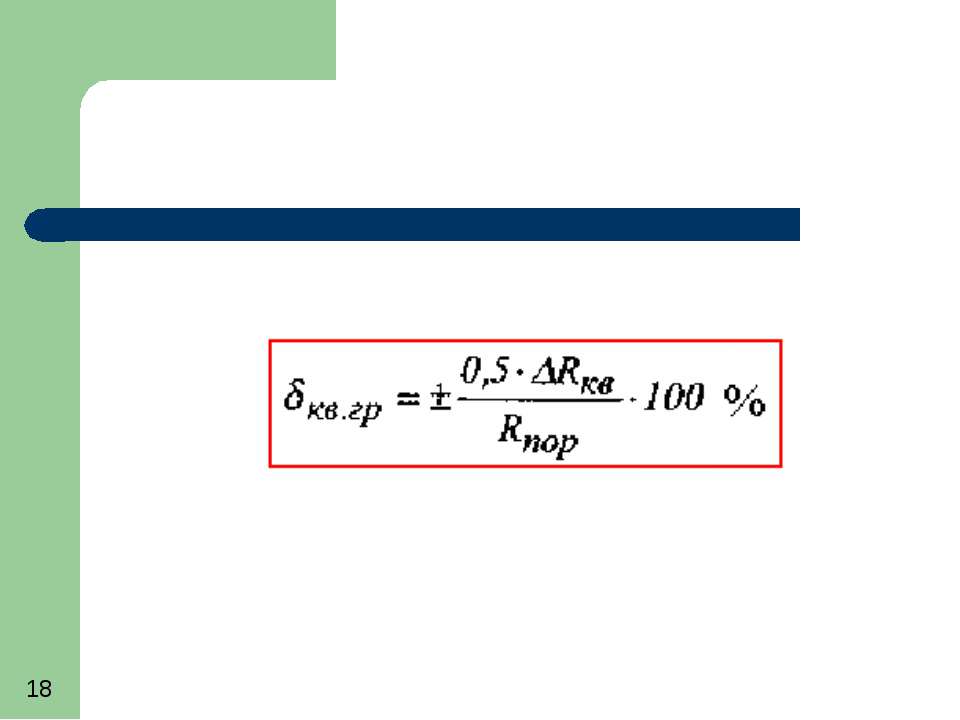

Для того, щоб вплив похибки квантування на результат вимірювання опору був нехтовно малим, слід забезпечити співвідношення звідки

Для зменшення похибки від опору з’єднувальних проводів використовують чотирипровідні схеми мостів Це дозволяє знизити нижню межу вимірювання опору до 0,5... 0,001 Ом

Схема одинарного моста із чотирипровідним під'єднанням досліджуваного об'єкта

Відносна похибка від впливу з'єднувальних проводів Для двопровідного моста Для моста із чотирипровідним під'єднанням

Схема автоматичного моста П – підсилювач РД – реверсивний двигун

Зведена похибка автоматичних мостів у кращому випадку дорівнює 0,25%, швидкодія -0,25с.

Подвійний міст постійного струму

При рівновазі моста I1 = I2 I3 = I4 Ix = IN IXRX + I3R3 = I1R1 INRN +I4R4 = I2R2 I3R3 + I4R4 = (IX – I3)r

Вирішив рівняння відносно RX отримаємо При виконання умови

Для зменшення похибок необхідно виконувати умови - r → 0 - опір резисторів R1,R2,R3,R4 > 10 Ом

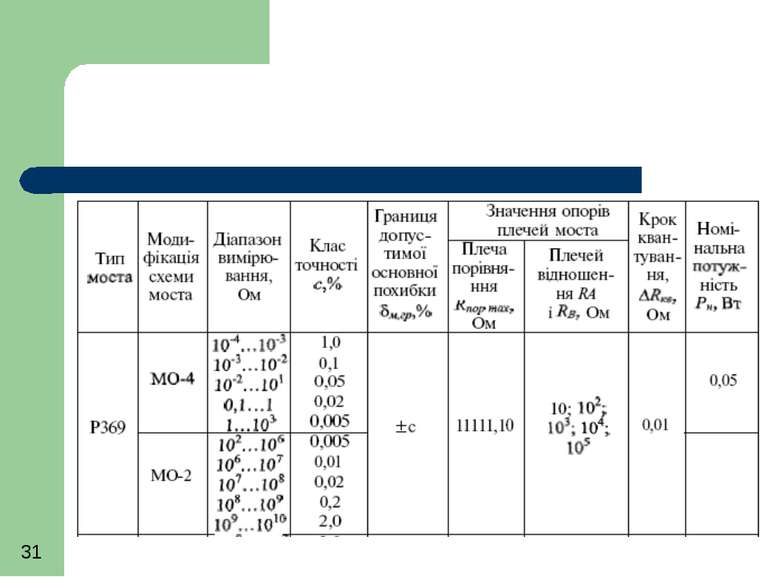
Границя основної допустимої похибки Вираженої у відсотках від значення вимірюваної величини, нормується одно- або двочленною формулою c,d - числові коефіцієнти, що характеризують похибку моста RK - кінцеве значення опору даного диапазону вимірювань

Характеристики моста Р329
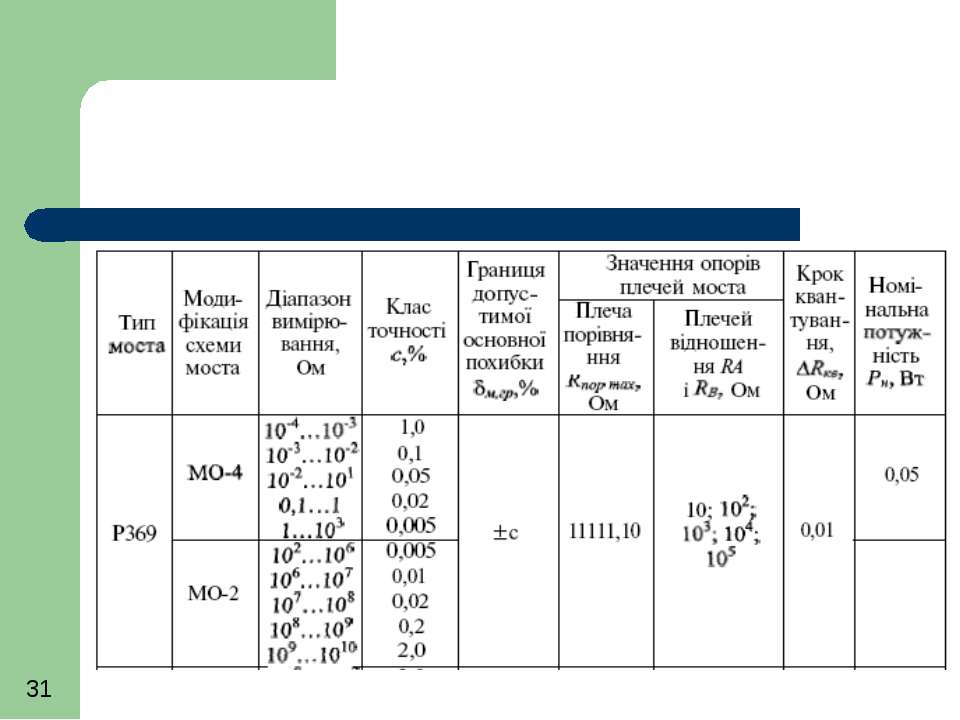

Схема моста змінного струму

Рівняння рівноваги Де - комплексні значення опорів моста

Враховуючи, що Отримаємо рівняння рівноваги у вигляді

Після розділення дійсних та уявних складових отримаємо умови рівноваги у вигляді двох рівнянь

У загальному випадку для зрівноваження моста змінного струму необхідно змінювати по черзі значення двох регулювальних елементів плеч моста (активного та реактивного опорів).

Мірою досконалості моста відносно швидкості досягнення рівноваги є гак звана збіжність (сходимость), яка характеризується кількістю почергових регулювань, необхідих для досягнення умови рівноваги.

Схеми мостів для вимірювання LX та QX катушок індуктивності

Компенсаційний метод вимірювання полягає в тому, що на вході пристрою порівняння (компаратора) одночасно діють дві величини - полярна або векторна вимірювана величина X та однорідна з нею компенсуюча зразкова величина Хк, розмір якої відтворюється мірою, а співвідношення між розмірами величин X та Xк встановлюють за вихідним сигналом пристрою порівняння.
 повна відсутність спожива...")
Перевагами компенсаційного методу вимірювання є: а) повна відсутність споживання енергії від джерела сигналу, що дає можливість вимірювати електрорушійну силу; б) висока точність вимірювання, особливо на постійному струмі.
 компенсатори постійного ст...")
У практиці електричних вимірювань застосовують: а) компенсатори постійного струму; б) компенсатори змінного струму: - прямокутно-координатні; - полярно-координатні.

Схема потенціометра постійного струму

Пол.”а” при Пол. “б” при

Схема вимірювання опору

Похибка вимірювання опору де δRN -похибка зразкової міри опору RN; δUKX,δUKN - похибки компенсатора при вимірюванні напруг URX, URN; δΚΒX, δΚΒΝ - відповідні похибки квантування.

Принцип дії компенсаторів змінного струму полягає у зрівноважуванні вимірюваної напруги Ux відомою компенсаційною напругою UK Момент рівності Ux =UK фіксується нульовим показом нуль-індикатора, при якому UНІ = 0.

Якщо вимірювана та компенсаційна напруги є періодичними функціями часу то для досягнення рівноваги компенсаційної схеми необхідно добитися рівності миттєвих значень Uх (t) = Uк (t)

Умови рівноваги - форми кривих компенсаційних напруг повинні бути ідентичними; - амплітудні значення і частоти компенсаційних напруг повинні бути рівними, тобто - фази компенсаційних напруг повинні бути протилежними, тобто φκ = -φχ = φχ

Схема прямокутно-координатного компенсатора змінного струму

Векторна диаграма

Прямокутно- координатний компенсатор має два вимірювальні контури або дві координати - координату "X" і координату "Υ", які гальванічне розділені за допомогою повітряного трансформатора (котушки взаємоіндуктивності) Μ. Внаслідок цього зсув фаз між робочими струмами координат Ικχ і Іку дорівнює 90°.

Прямокутно- координатний компенсатор Відповідно зсув фаз між складовими компенсаційної напруги UKX і UKY, які знімають з компенсаційних опорів RKX та RKY відповідних координат, також дорівнює 90°. З'єднання середніх точок опорів RKX та RKY дає змогу одержати точку "О" прямокутної системи координат.
Схожі презентації











Категорії










")